
🛩️挑战信息
- 难度级别
- 小有挑战
- 最大允许
- D 类飞机(进近速度分类)
- 适合机型
- 窄体喷气机、宽体喷气机
- 当地常客
-
大型、重型客机
🥵难点灾害
🌏示例航线(飞行约30分钟)
- 起飞
- ZSYT / YNT
- 离场
- 05 跑道 > IGD91D 23 跑道 > IGD81D
- 线路
- IGDEG W173 NIXEP
- 目的
- ZYTL / DLC
- 进场
- NIX04A > 10 跑道
- 进近
- ILS-Z 10 via TL107
- 长度
- 约 140 海里
- 巡航
- 3300米+
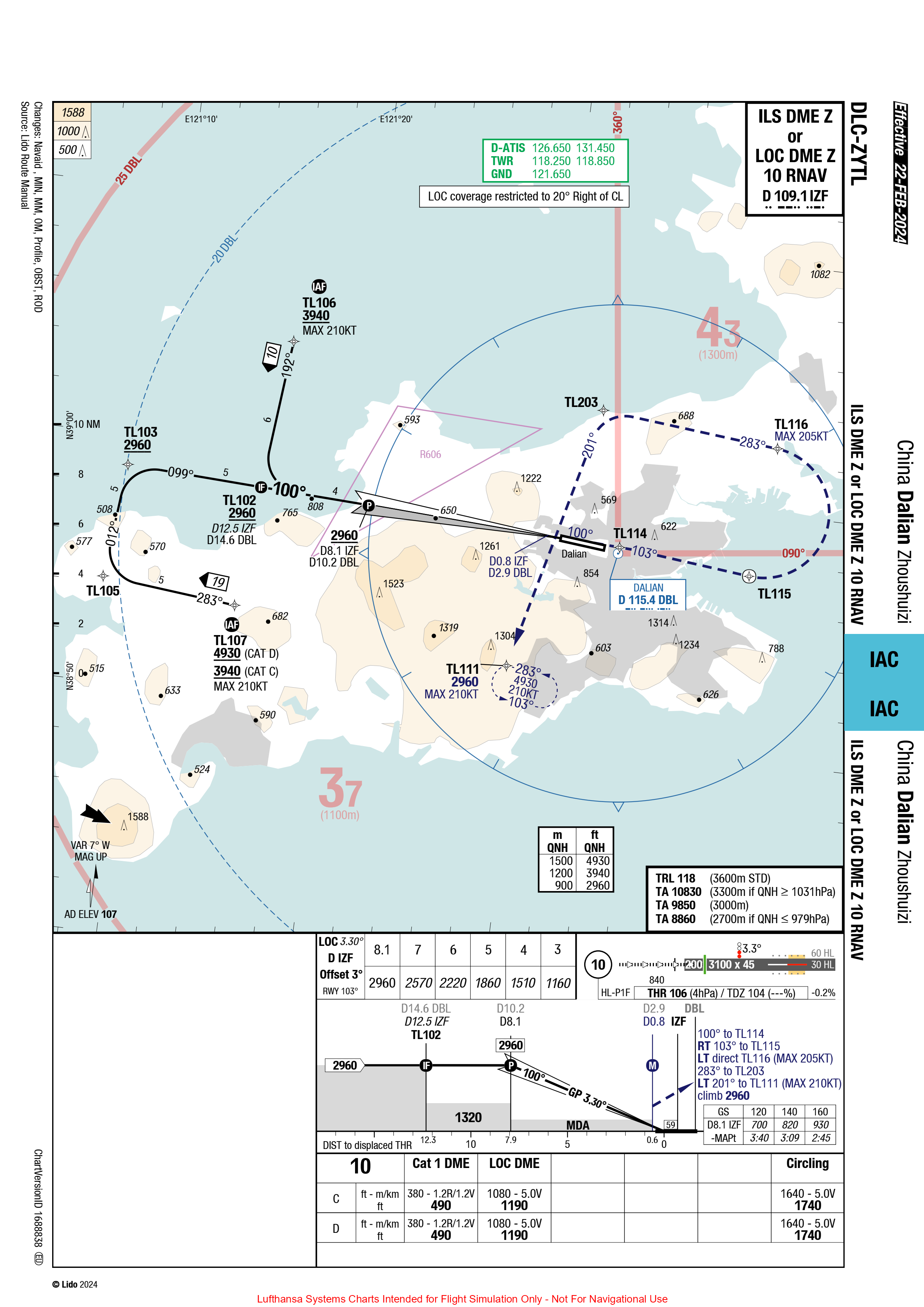
🗺️进近说明 & 航图
ILS 进近 Instrument Landing System Approach
- “盲降”进近;
- 根据航图,在飞行电脑中输入/确认
ILS频率,部分机型还需要在自动驾驶面板手动调节航迹Course; - 确保飞机自动驾驶系统先后截获 航向道
LOC (Localizer)和 下滑道G/S (Glide Slope),并按指引飞行。
航向道偏移
10 跑道 有完备的仪表进近程序,但都有航向道偏移(Localizer Offset):程序描述的第五边与跑道航向偏差了 3°。
- 这是为了绕开第五边(Final)北边(左侧)的山,所以航向道偏右。
- 飞行员需要自行选择时机,断开自动驾驶,进行手动修正。但由于上述山的存在,所以不要过早修正。
另外,10 跑道 仪表程序的下滑角,和跑道 PAPI 灯均为 3.3°,稍大于标准的 3° 下滑。
10 跑道 的 RNP (AR) 程序也有这一偏移。
下面列出适合示例航线的进近程序的航图:
不要以为 3° 的数字不大,实际看上去偏差挺大的:

| 上图机头向右偏因为有强力右侧侧风 |
最后更新于 2026 年 2 月 4 日 01:30